| レクサス(トヨタ自動車㈱)は,レクサスブランドのハイブリッドセダンGS450hを発売しました。FR専用ハイブリッドシステムを初めて採用した(自動車技術トレンド第11回参照)ほか,安全や快適性に関する数々の新機構を採用しています。そのなかでもドライバーモニター付きプリクラッシュセーフティシステム(ミリ波レーダー方式)が注目されます。 |

レクサスGS450hの外観では、専用のアルミ
ホイールとバッジのみ通常のGSと異なる。
| Motown21トップ > 技術革新 > 自動車技術トレンド |

| 第第12回 レクサスの新プリクラッシュセーフティシステム |
|
レクサスGS450hの外観では、専用のアルミ ホイールとバッジのみ通常のGSと異なる。 |
●レーダー方式プリクラッシュセーフティシステムの作動(図1) |
| すでにトヨタ車に採用されているレーダー方式のプリクラッシュセーフティシステムは,車両前方の車両や障害物との衝突を予知して,衝突の可能性がある場合は,表示とブザーで警報を発します。そして衝突の可能性が高い場合は,ブレーキ制動を行うことで油圧を高めるブレーキアシスト制御(図2)およびサスペンションダンパーの減衰力を最適に制御するAVS(Adaptive
Variable Suspension System)制御(図3)を行い,衝突した際の衝撃を軽減および車両姿勢の安定を確保します。 さらに衝突不可避の状態では,強制的にブレーキをかけるブレーキ制御(図4)やシートベルトの巻き取り(図5)を行い,衝突した際の衝撃を軽減します。このときストップランプを点灯させて後続車に注意を促します。また緊急ブレーキ操作をした場合および車両の横滑りを検知した場合にもシートベルトの巻き取りを行って衝突した際の衝撃を軽減します。 (すべての図は、クリックすると大きくなります) |
|
●新型プリクラッシュセーフティシステムの特徴 |
| バージョンLに運転者(ドライバー)の顔の向きを検知するドライバーモニター付きプリクラッシュセーフティシステムを新採用しています(図6)。従来のミリ波レーダーによる進路上の車両や障害物検知に加え,ステアリングコラム上に搭載したCCDカメラと画像処理コンピュータを用いてドライバーの顔の向きを監視し,ドライバーが正面を向いていない状態で障害物との衝突の危険を判断した場合,ブザーと表示による警報を通常より早いタイミングで前出しして注意を促します。さらにブザーを前出しした後に衝突危険が高まり,正面を向いていない状態が続いた場合は,ブレーキ制御を行い体感的に危険を知らせることで,衝突被害軽減効果を実現します(図7)。 | 
|
●新型プリクラッシュセーフティシステムを構成する部品 |
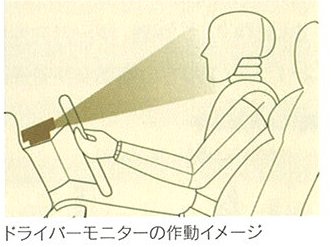
| ①ミリ波レーダーセンサ ミリ波レーダーセンサ(図8)をフロントグリル裏に設定しています。ミリ波とは,30GHz~300GHzまでの非常に高い周波数帯で,真空中での波長が1~10㎜と極めて短い電波を指します。雨や雪などの状況下でも影響を受けにくく,物体認識に優れた性能を発揮することができます。このシステムでは76GHz帯のレーダーを採用しています。ミリ波レーダーセンサの射程範囲内にミリ波を反射する物体が存在した場合,その反射波によって対象物との距離,相対速度および方向を検知し,そのデーターを基にコンピュータが衝突不可避を判断します。対象物の方向は,反射波の角度,距離は電波を発射してから反射波が帰ってくるまでの時間,対象物の速度は反射波の周波数変化(ドップラー効果)を利用して検知しています。またカーブでは,ヨーレイトセンサ,ステアリングセンサの情報を基にカーブの半径を推定して進路の補正を行っています。 ②ドライバーモニターカメラ これが新しく設定されたもので,ステアリングコラムカバー上部に近赤外線CCDカメラを配置しています(図9)。カメラ内部に近赤外線LEDを内蔵し,昼夜を問わず認識できるものとしています。図10は,ドライバーモニターの作動イメージです。 ③ドライバーモニターコンピュータ 顔幅,目,口などの位置によって顔の向きを算出するドライバーモニターコンピュータがディスタンスコントロールコンピュータに顔向き検知信号を送ります。顔向き状態の判断や判断時の制御などは,次のとおりです(図11)。 a.ドライバーモニターカメラの情報からドライバーの顔の輪郭と中心線を抽出し,中心線と輪郭線の左右間隔比率から顔向き度を算出します。この値から正面を向いていない状態を判断します。 b.衝突の可能性があり,かつ正面を向いていない状態と判断しているときは,通常の警報タイミングよりも警報を前出しします。この時間は継続時間に応じて増加します。 c.次の条件を満たした場合は,警報ブレーキをかけます。すなわち,正面を向いていないと判断した場合,障害物との相対速度が40㎞/h以上および自車速度が40㎞/h以上の場合,ステアリングが一定角度以内(回転中を除く)の場合,の3項目です。 |
|
Warning: include(http://www.motown21.com/Templates/footerSJIS.inc.php): failed to open stream: HTTP request failed! HTTP/1.1 429 Too Many Requests
in /home/phpschool/motown21.com/public_html/Tech/Trend_12/index.php on line 257
Warning: include(): Failed opening 'http://www.motown21.com/Templates/footerSJIS.inc.php' for inclusion (include_path='.:/opt/php-7.4.33-2/data/pear') in /home/phpschool/motown21.com/public_html/Tech/Trend_12/index.php on line 257