|
①ミリ波レーダーセンサ
ミリ波レーダーセンサ(図8)をフロントグリル裏に設定しています。ミリ波とは,30GHz~300GHzまでの非常に高い周波数帯で,真空中での波長が1~10㎜と極めて短い電波を指します。雨や雪などの状況下でも影響を受けにくく,物体認識に優れた性能を発揮することができます。このシステムでは76GHz帯のレーダーを採用しています。ミリ波レーダーセンサの射程範囲内にミリ波を反射する物体が存在した場合,その反射波によって対象物との距離,相対速度および方向を検知し,そのデーターを基にコンピュータが衝突不可避を判断します。対象物の方向は,反射波の角度,距離は電波を発射してから反射波が帰ってくるまでの時間,対象物の速度は反射波の周波数変化(ドップラー効果)を利用して検知しています。またカーブでは,ヨーレイトセンサ,ステアリングセンサの情報を基にカーブの半径を推定して進路の補正を行っています。
②ドライバーモニターカメラ
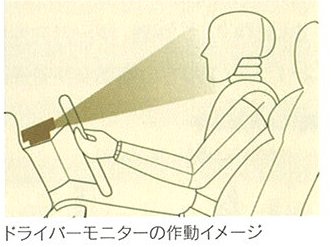
これが新しく設定されたもので,ステアリングコラムカバー上部に近赤外線CCDカメラを配置しています(図9)。カメラ内部に近赤外線LEDを内蔵し,昼夜を問わず認識できるものとしています。図10は,ドライバーモニターの作動イメージです。
③ドライバーモニターコンピュータ
顔幅,目,口などの位置によって顔の向きを算出するドライバーモニターコンピュータがディスタンスコントロールコンピュータに顔向き検知信号を送ります。顔向き状態の判断や判断時の制御などは,次のとおりです(図11)。
a.ドライバーモニターカメラの情報からドライバーの顔の輪郭と中心線を抽出し,中心線と輪郭線の左右間隔比率から顔向き度を算出します。この値から正面を向いていない状態を判断します。
b.衝突の可能性があり,かつ正面を向いていない状態と判断しているときは,通常の警報タイミングよりも警報を前出しします。この時間は継続時間に応じて増加します。
c.次の条件を満たした場合は,警報ブレーキをかけます。すなわち,正面を向いていないと判断した場合,障害物との相対速度が40㎞/h以上および自車速度が40㎞/h以上の場合,ステアリングが一定角度以内(回転中を除く)の場合,の3項目です。 |

図8.ミリ波レーダーセンサはフロントグリル裏に設定されています。
|

| 図9.ドライバーモニターカメラの設置場所はステアリングコラムカバー上部。近赤外線LEDを内蔵したCCDカメラで昼夜を問わず顔を認識できるものとしています。 |


| 図11.ドライバーモニターコンピュータは,顔幅,目,口などの位置で顔の向きを算出しディスタンスコントロールコンピュータへ顔向き検知信号を送ります。 |
|